Vehicle Detection Project
The goals / steps of this project are the following:
- Perform a Histogram of Oriented Gradients (HOG) feature extraction on a labeled training set of images and train a classifier Linear SVM classifier
- Optionally, you can also apply a color transform and append binned color features, as well as histograms of color, to your HOG feature vector.
- Note: for those first two steps don’t forget to normalize your features and randomize a selection for training and testing.
- Implement a sliding-window technique and use your trained classifier to search for vehicles in images.
- Run your pipeline on a video stream (start with the test_video.mp4 and later implement on full project_video.mp4) and create a heat map of recurring detections frame by frame to reject outliers and follow detected vehicles.
- Estimate a bounding box for vehicles detected.
Rubric Points
Here I will consider the rubric points individually and describe how I addressed each point in my implementation.
Code Architecture
My code is separated in different files. Here is a diagram to represent the interactions between them.
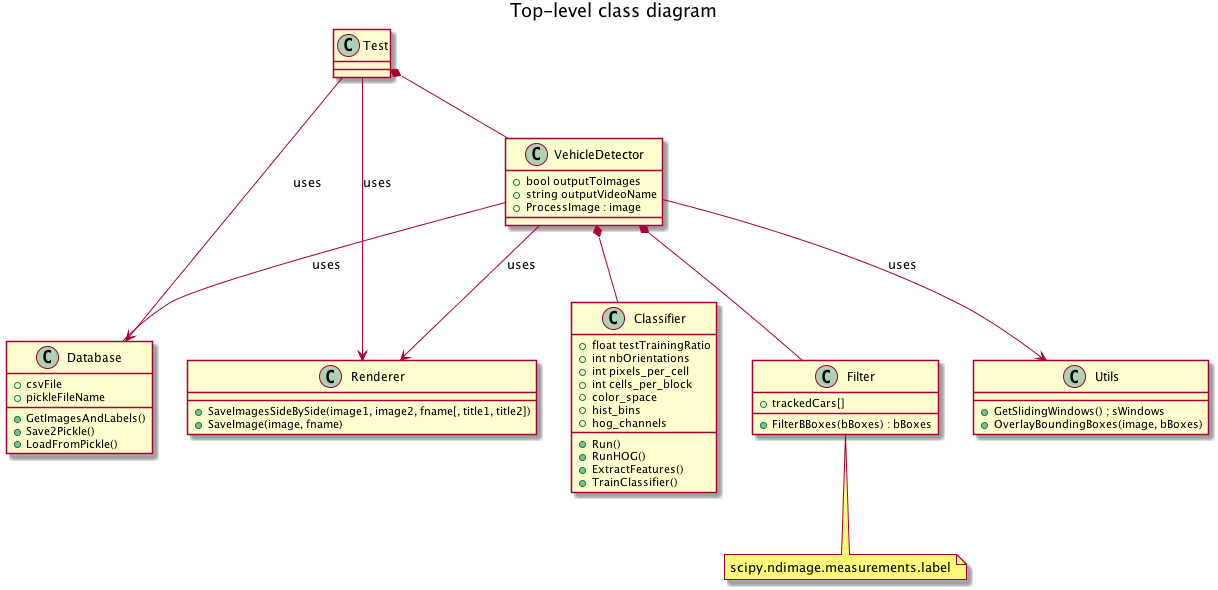
Image features
Histogram of Oriented Gradients (HOG)
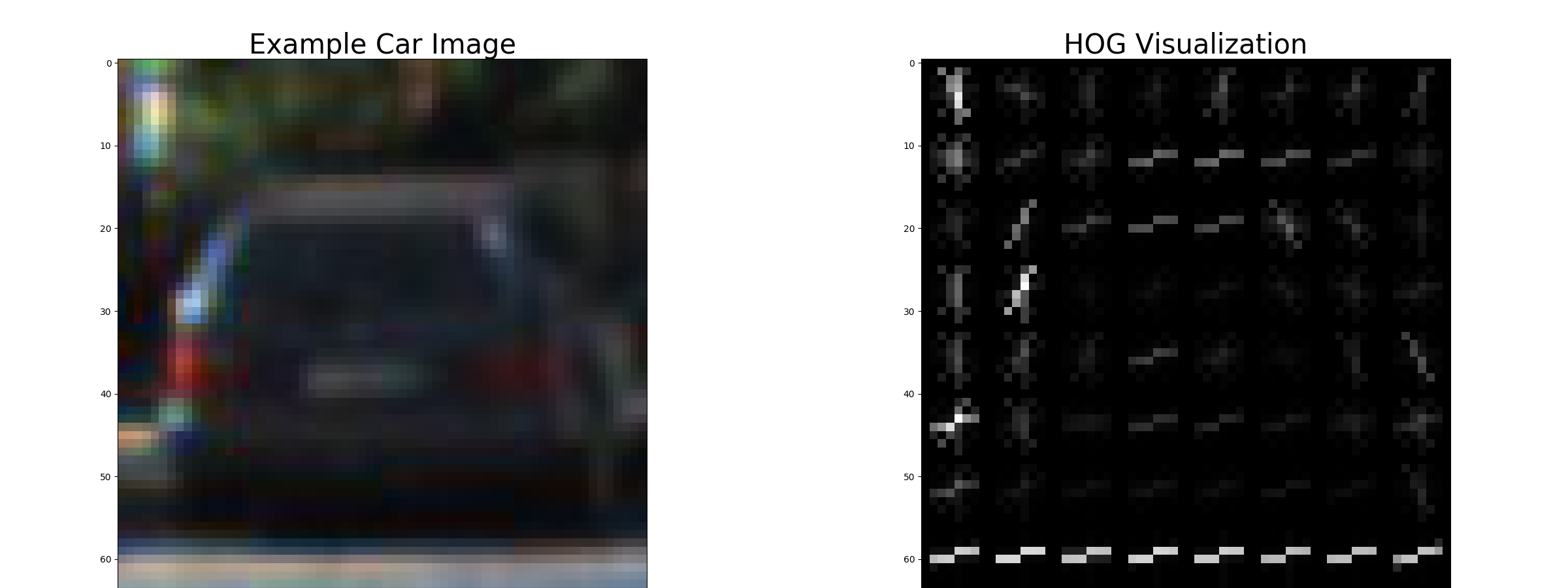
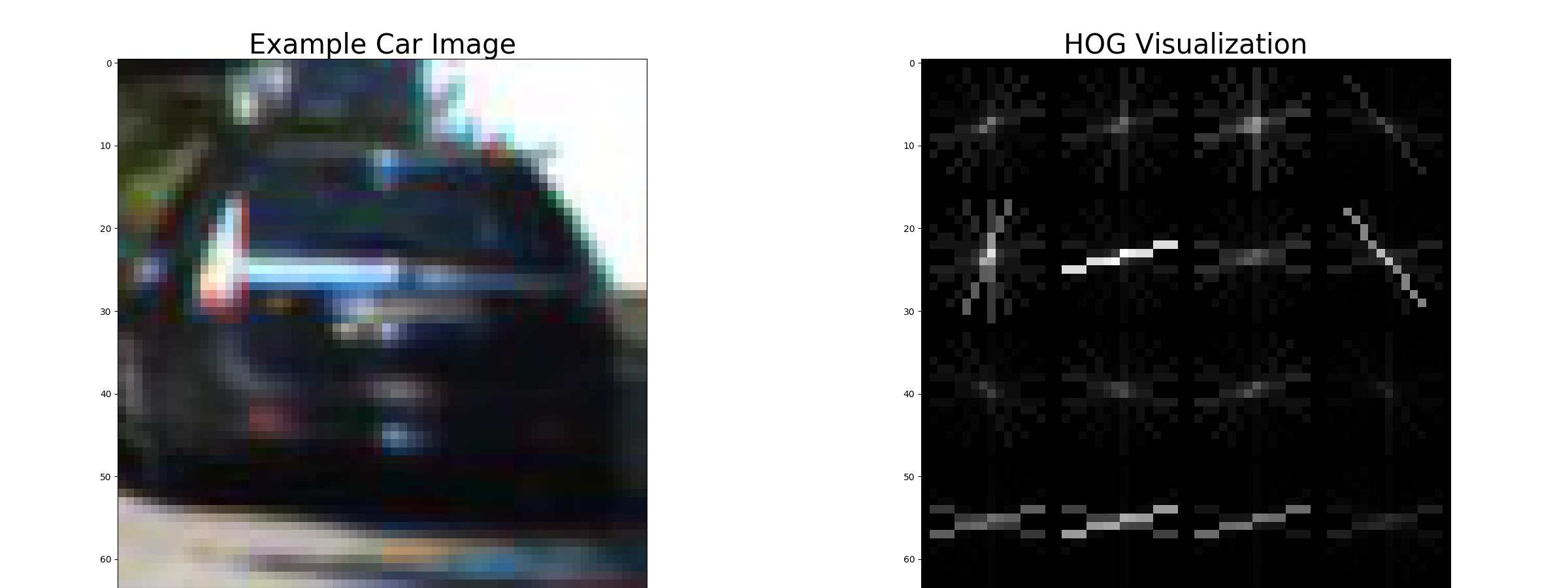
I started by reading in all the vehicle and non-vehicle images. Here is an example of one of each of the vehicle and non-vehicle classes:

I then explored different color spaces and different skimage.hog() parameters (orientations, pixels_per_cell, and cells_per_block). I grabbed random images from each of the two classes and displayed them to get a feel for what the skimage.hog() output looks like.
Here is an example using the grayscale conversion from RGB color space and HOG parameters of orientations=9, pixels_per_cell=(8, 8) and cells_per_block=(2, 2):
and without car
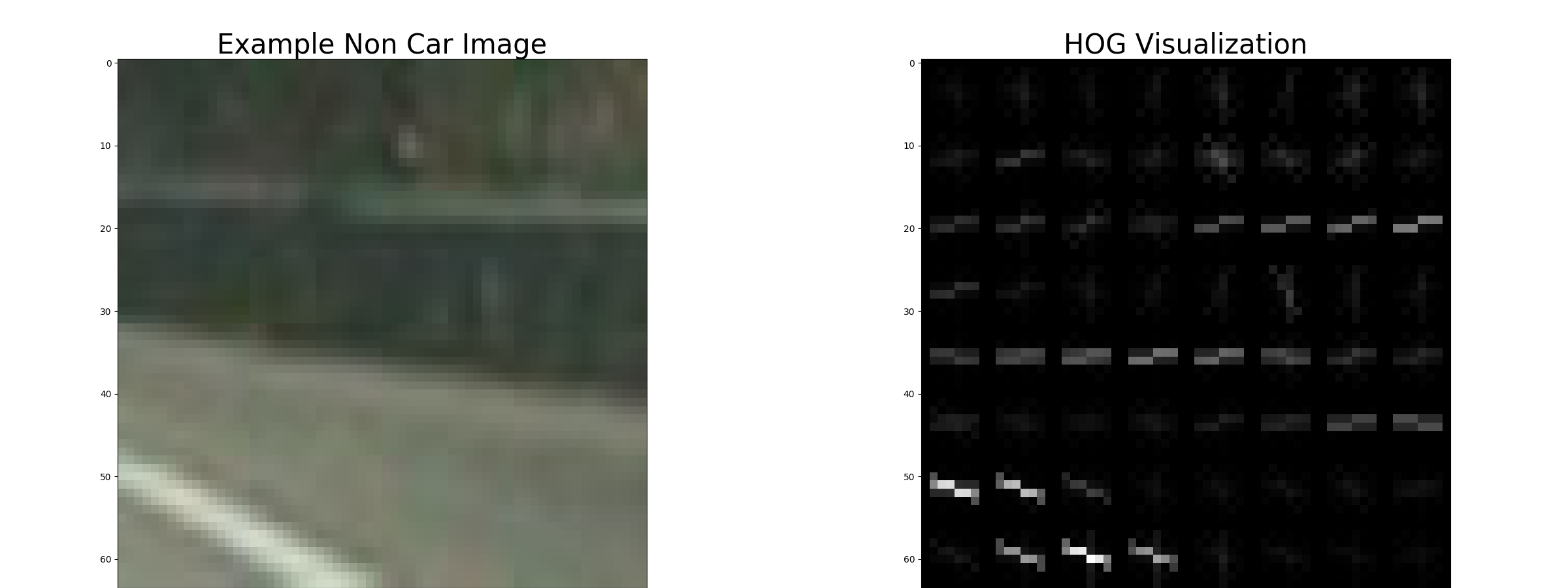
We can clearly observe different pattern in the orientation of the gradient of each cell.
I also tried to change the number of pixels per cell to 16.
But we see that it is not clear whether we have a car here or not by just looking at the HOG features.
After testing, I didn’t experience any improvement by increasing the number of orientations but I felt a loss in accuracy when I downscaled the cells per block to 1.
Spatial binning
By resizing the image into a 32 by 32 image and unravelling the 3D array that constitute the image, I obtain color bins.
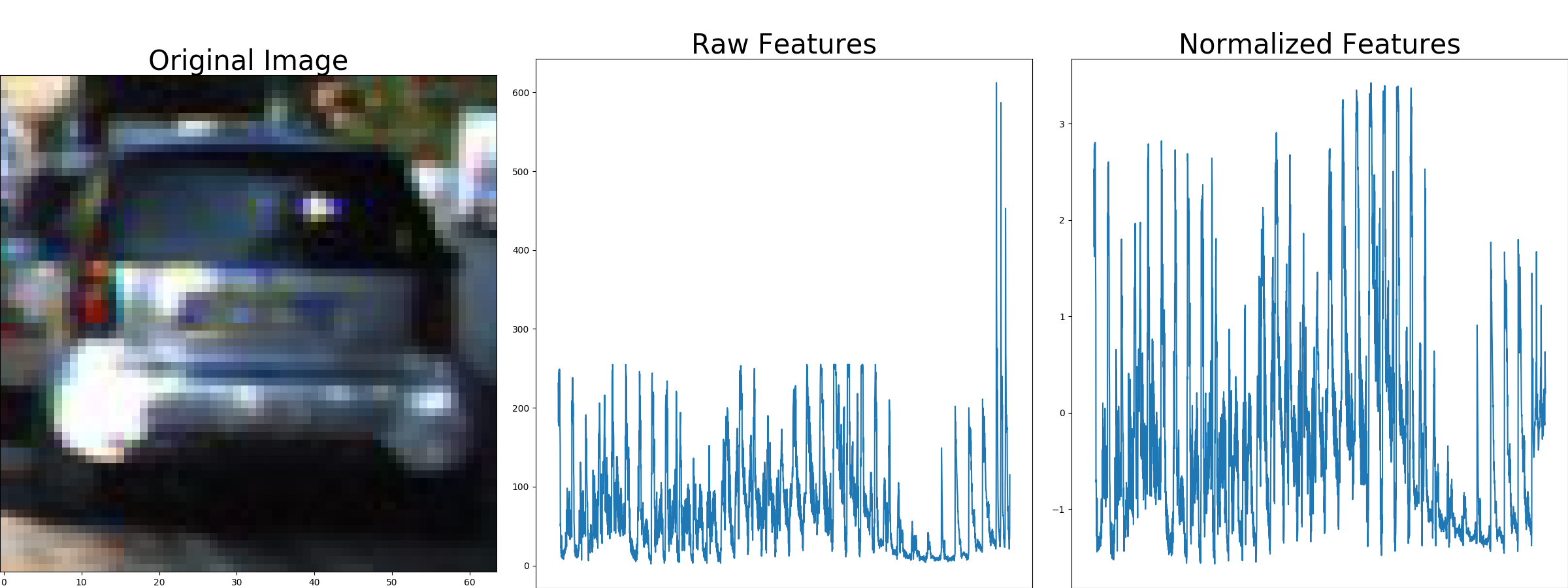
Normalization
Since I am aggregation all of these different features, I need to scale them
so that they are comparable. To do so, I use the StandardScaler() provided
by the sklearn.preprocessing library.
I first need to fit() a scaler with the training data and then for each images
I transform() the extracted features to scale them correctly before classify
the image.
In the Utils.py file:
@staticmethod
def NormalizeFeatures(car_features, notcar_features, scaler):
'''
Normalize each set of features so that they have equal variance
and 0 mean.
'''
Classifier
I trained a linear SVM using the LinearSVC() class provided by the sklearn.svm
library.
I also tried to use a non linear classifier that way :
parameters = {'kernel':('linear', 'rbf'), 'C':[0.8,0.9, 1, 1.1]}
svr = svm.SVC()
self.classifier = GridSearchCV(svr, parameters)
I obtained great results but the time to predict() exploded. It wasn’t a
viable option. The GridSearchCV returned the optinal kernel to be rbf and
the C argument to be 0.9.
Sliding Window Search
The code for this step is contained in the Utils.py file as a static method of the Utils class:
@staticmethod
def GetSlidingWindows(img, x_start_stop=[None, None], y_start_stop=[None, None],
xy_window=(64, 64), xy_overlap=(0.5, 0.5)):
pass
This function is mainly the one given by Udacity.
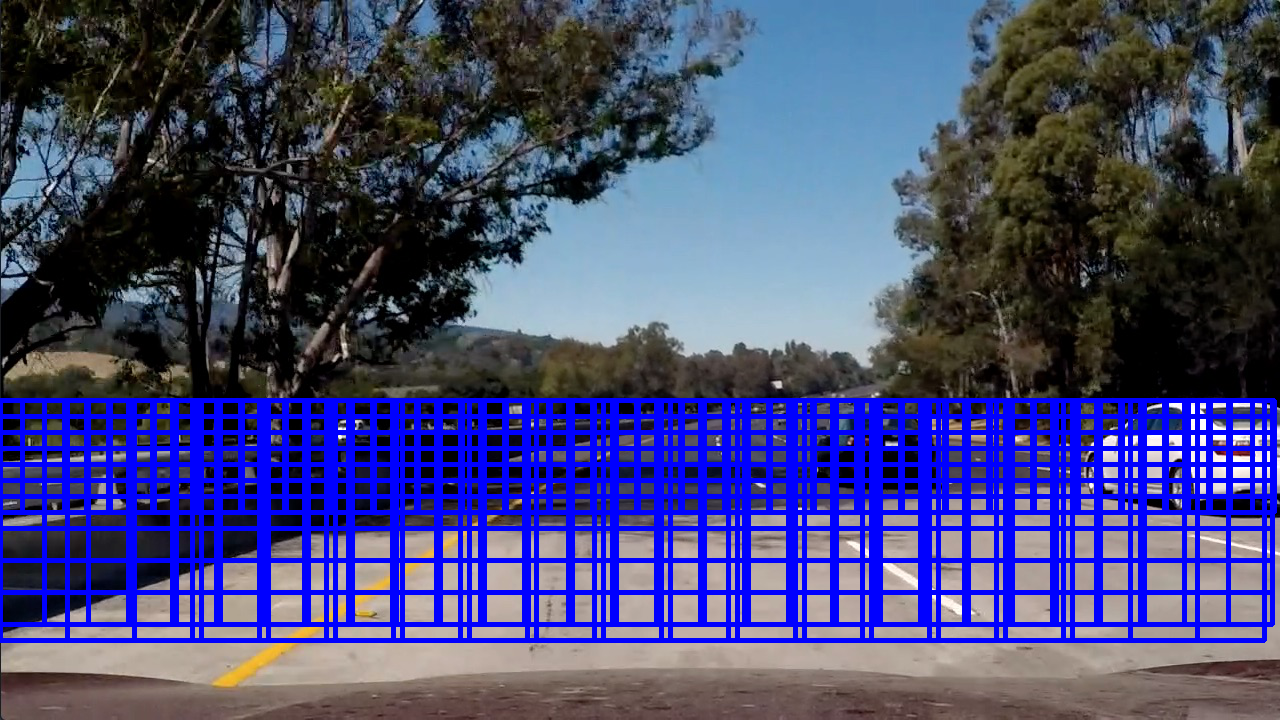
I decided to start with only 50% of overlapping between 2 windows but I then felt like I didn’t have enough windows to detect accurately the vehicles. I then augmented the overlapping in both x and y directions to 75% then slowed down the detection to 20 seconds per images with about 2000 sliding windows. I finally tried to reduce the x overlapping to 50% and ended up with 256 sliding windows and performing the detection on these was reasonably slow.
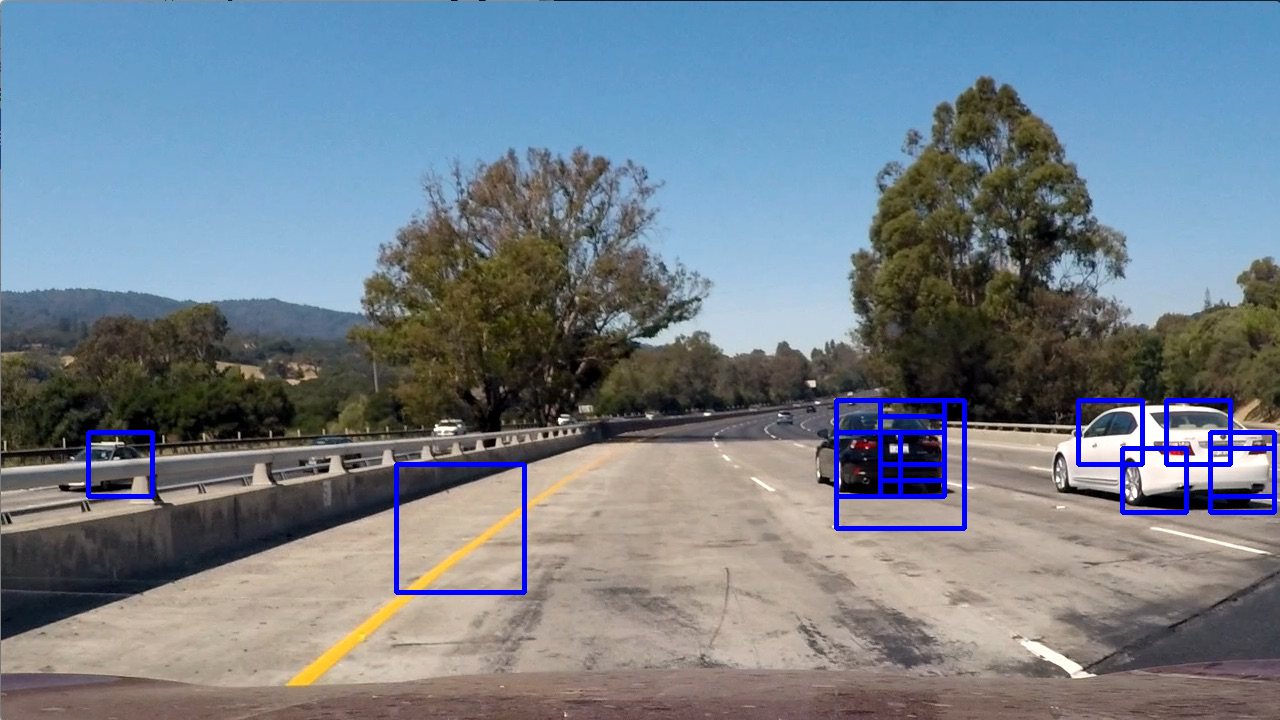
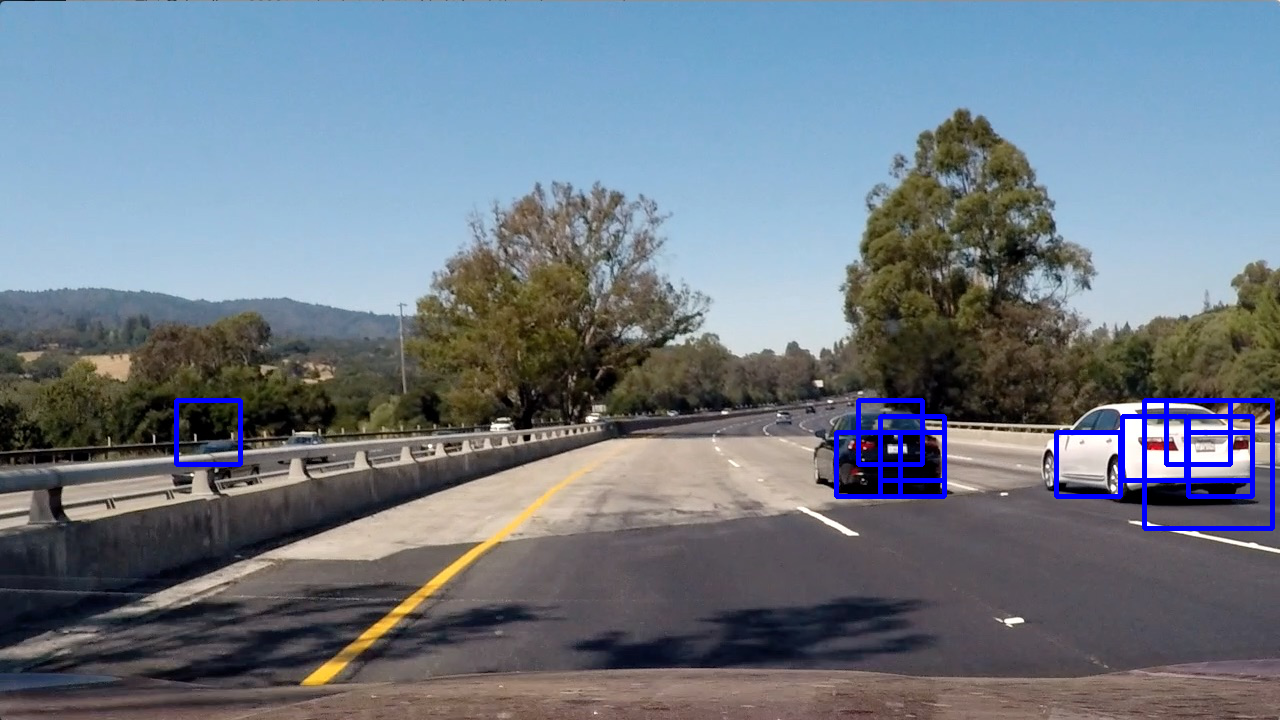
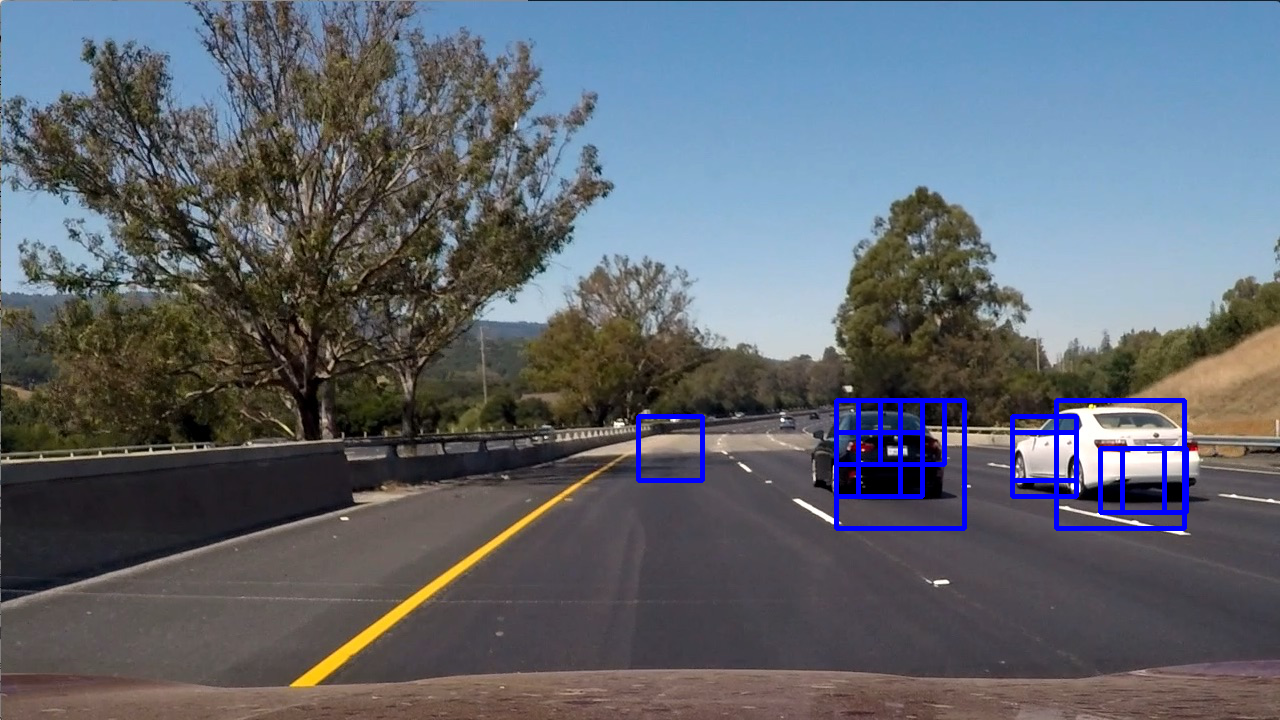
####2. Show some examples of test images to demonstrate how your pipeline is working. What did you do to optimize the performance of your classifier?
Ultimately I searched HOG features using YUV color space but removed removed the spatially binned color and histograms of color in the feature vector because the size of the feature vector was too big and was crashing the program. It still provided acceptable results. Here are some example images:
- First
- Second
- Third
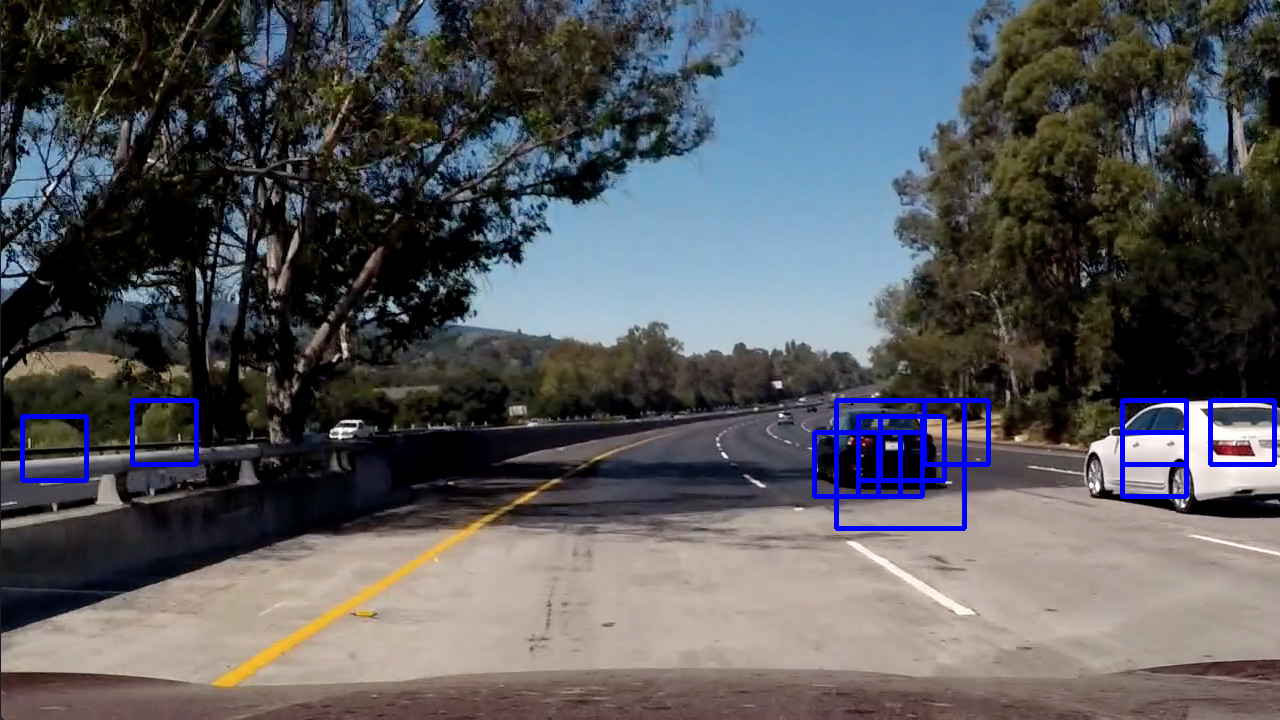
- Fourth
Video Implementation
My pipeline can be applied to videos. The only difference is that I apply some filtering on the detections to reduce the instability and flickering.
Here’s a link to my video result
Filtering
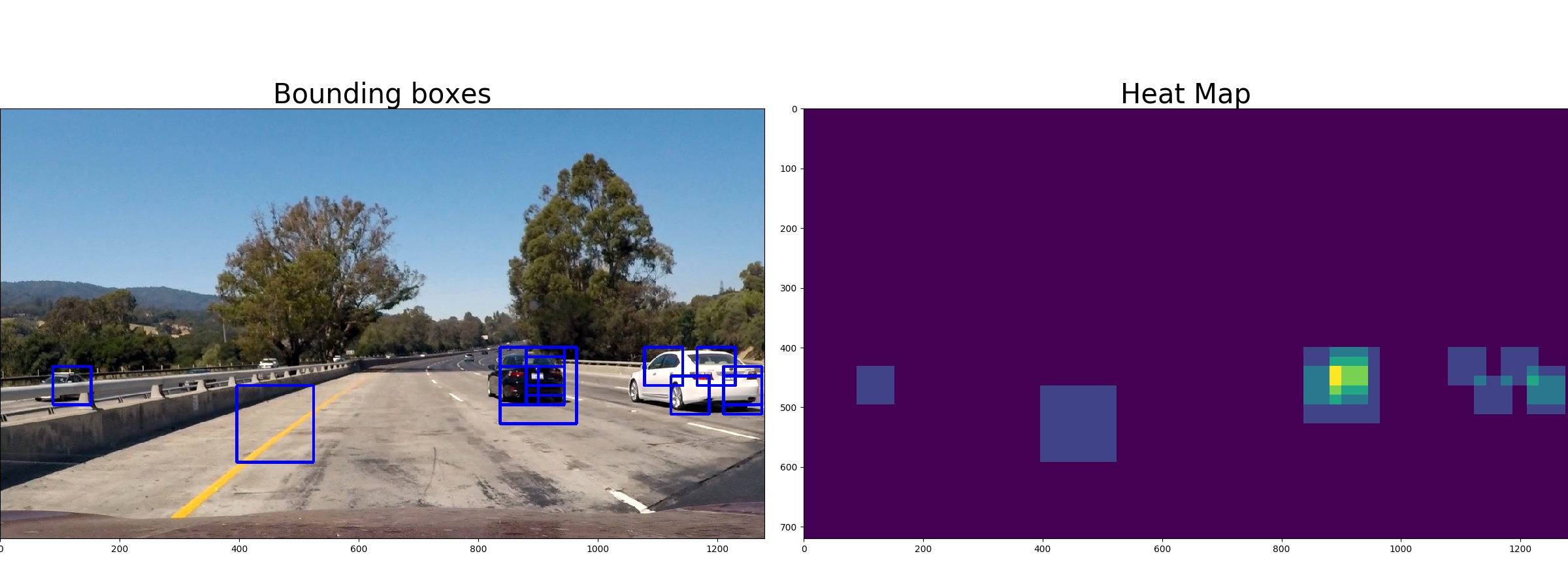
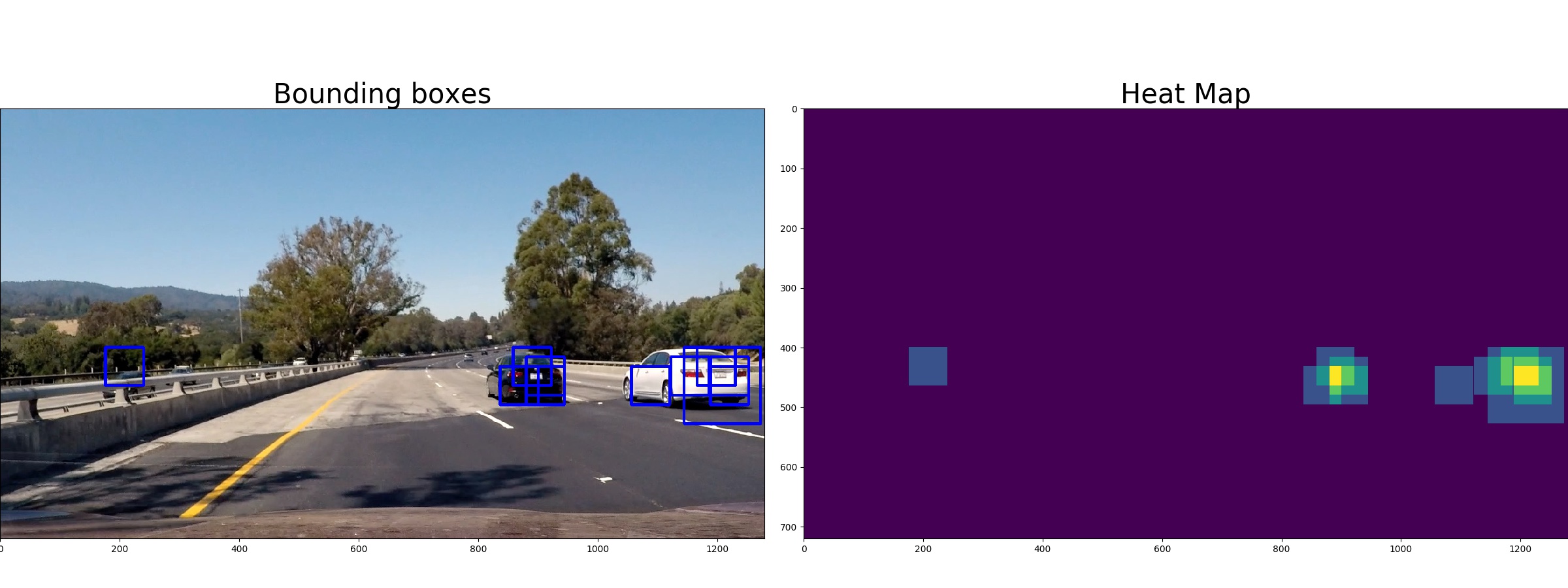
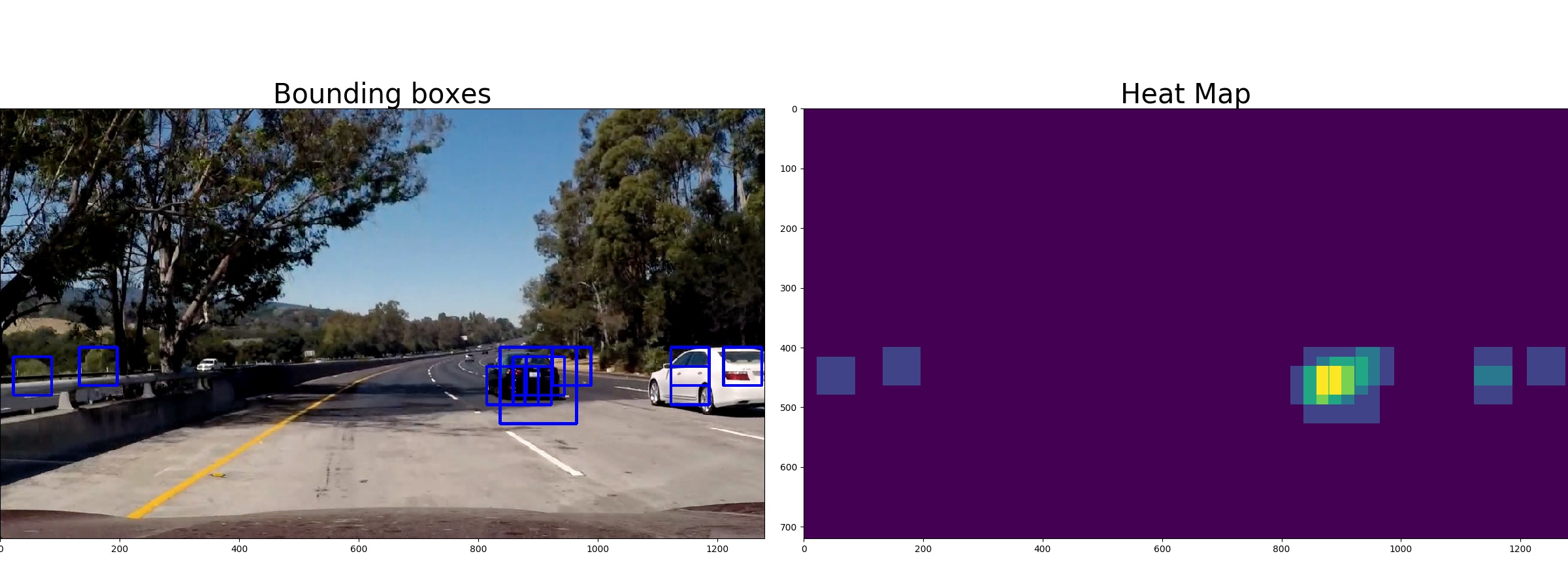
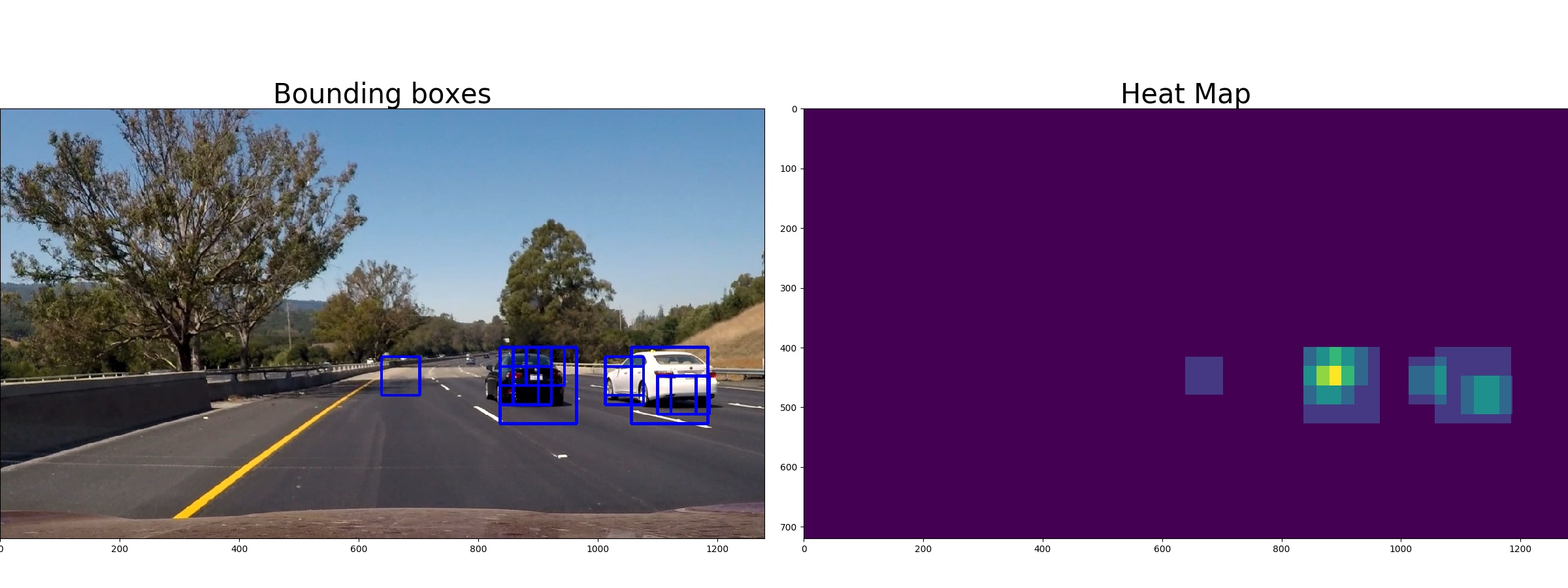
Heat Map
I recorded the positions of positive detections in each frame of the video. From the positive detections I created a heatmap and then thresholded that map to identify vehicle positions.
Labelling
I then used scipy.ndimage.measurements.label() to identify individual blobs in the heatmap. I then assumed each blob corresponded to a vehicle. I constructed bounding boxes to cover the area of each blob detected.
Here’s an example result showing the heatmap from a series of frames of video, the result of scipy.ndimage.measurements.label() and the bounding boxes then overlaid on the last frame of video:
Here is the output of scipy.ndimage.measurements.label() on the integrated heatmap on 4 frames:
Discussion
The HOG technique is quite unstable and although it works ok with this video, I would suspect this implementation to generalize pretty badly.
The region used for creating the bounding boxes is hard-coded to optimize the success of this video but would probably fail if used outside the highway.
If I had to do it again, I would investigate a deep learning approach that would learn much more complex classification boundary. I have been impressed by the YOLO and SDD methods.
Personal Notes
Histogram of colors : https://classroom.udacity.com/nanodegrees/nd013/parts/fbf77062-5703-404e-b60c-95b78b2f3f9e/modules/2b62a1c3-e151-4a0e-b6b6-e424fa46ceab/lessons/fd66c083-4ccb-4fe3-bda1-c29db76f50a0/concepts/4f0692c6-e22d-4f28-b5d0-7990a4d8de86
HOG: https://www.youtube.com/watch?v=7S5qXET179I
Udacity dataset : https://github.com/udacity/self-driving-car/tree/master/annotations